
���ߺ�(ji��n)�飺������(1995-)��Ů�����ճ����ˣ��Tʿ����Ҫ�о������ǙC(j��)��ҕ�X��E-mail��1125924814@qq.com��
оƬ��ُ�W(w��ng)��ע�����χ���(n��i)���ڙ�(qu��n)IC�����̬F(xi��n)؛�YԴ��оƬ��挍(sh��)�r(sh��)��ԃ���ИI(y��)�r(ji��)���������ُ����ICоƬ������(n��i)���I(y��)оƬ��ُƽ�_(t��i)��
ժҪ����(sh��)�(y��n)�Y(ji��)��������ԓ�㷨�܉��ڴ����(sh��)��r��(sh��)�r(sh��)����(zh��n)�_�ؙz�y(c��)��ۙ���|�������C����܉���İ�ȫ�\(y��n)�С�
0 ����
�S���҇�늚⻯�F·����١����d����IJ���l(f��)չ�����|�W(w��ng)- �ڸ����\(y��n)�Р�B(t��i)�£���늹�Խ��Խ�ܵ��P(gu��n)ע[1-2]�����ڽ��|�W(w��ng)�c��늹������L�ڱ��ֽ��|���ڙC(j��)܇����^����ʼ�Kĥ�p���o�C(j��)܇ȡ��������T��ɿ����أ�ֱ��Ӱ푙C(j��)܇����B(t��i)����(y��n)�ؕr(sh��)��ɰ�ȫ�¹ʡ���ˣ���Ҫ��(sh��)�r(sh��)�z�y(c��)���|�W(w��ng)���\(y��n)�Р�B(t��i)���Դ_���C(j��)܇�İ�ȫ�\(y��n)�С�
�����������(n��i)�⌦(du��)���|�W(w��ng)�\(y��n)�Р�B(t��i)�ıO(ji��n)�y(c��)�������о��W(xu��)�ߵďV���P(gu��n)ע���īI(xi��n)[3]����˻��ڈD��̎�����F·���|�W(w��ng)�z�y(c��)ϵ�y(t��ng)�����R(sh��)�e���|���Č�(d��o)�ߡ�����ֵ��Ӳ�c(di��n)���īI(xi��n)[4]���ø߾��Ȃ������ռ����A�ضȵȅ���(sh��)������˻��ڏ����͜ضȵ��ھ��O(ji��n)��ϵ�y(t��ng)���īI(xi��n)[5] �о���һ�נ����Դ���|�W(w��ng)�ض��ھ��O(ji��n)�y(c��)ϵ�y(t��ng)����ֻ�z�y(c��)�˽��|�W(w��ng)ijЩ�P(gu��n)�I��λ�Ĝضȡ�����������W(xu��)�����_�l(f��)��һ���ڼt�����x�Ľ��|�W(w��ng)�d���ضȱO(ji��n)�y(c��)����ϵ�y(t��ng)����(du��)��(sh��)�F(xi��n)�Ԅ�(d��ng)�O(ji��n)�y(c��)������Ҫ���x��
���ڙC(j��)܇������^������Ҫ��(j��ng)�����Q��·���ڣ����˽�Q���W(w��ng)���x����İ�ȫ�¹ʣ���������˽��|�W(w��ng)Ŀ��(bi��o)�z�y(c��)��ۙ�㷨�����Ԍ�(sh��)�r(sh��)���ٙz�y(c��)���|�W(w��ng)����(zh��n)�_��ۙ���|����
1 �㷨����
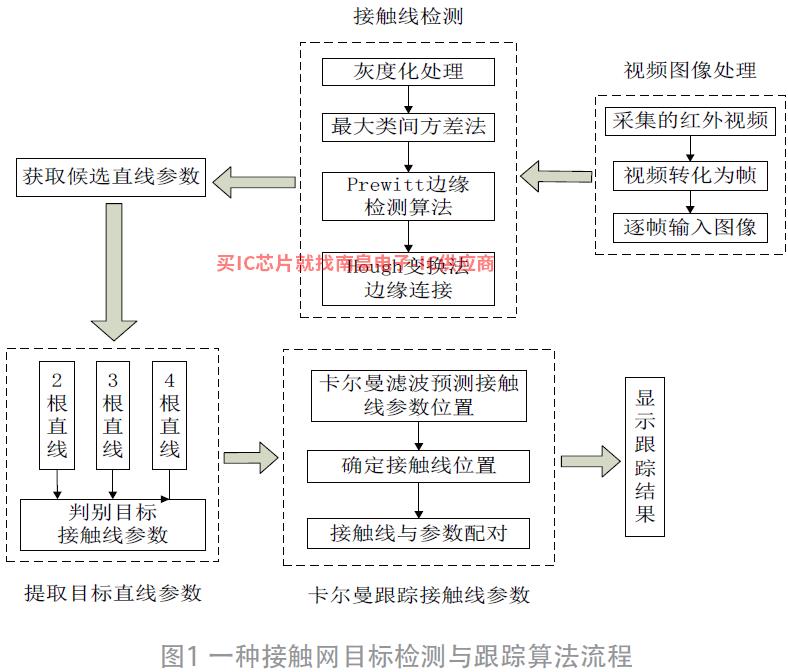
ԓ�㷨��Ҫ�֞�ɲ��֣����|���z�y(c��)�ͅ���(sh��)��ȡ��ۙ���z�y(c��)�������Ȍ�(du��)ݔ�뎬�M(j��n)�лҶȻ�̎����Ȼ��քeʹ��OTSU ��ȡ���|�W(w��ng)��߅�������ЃɷN���������m��(y��ng)�ֵ�ָ��߅���z�y(c��)Hough �B��ֱ��߅����׃�Q���ڼt��ҕ�l�D�������У��^�����(sh��)���|���ͳ������Ɍ�(du��)���F(xi��n)��ҕ�l�D���ֱ������˽��|���ͳ�������ҕ�X�ϛ]���@���������y�Ը�ۙĿ��(bi��o)���|������ˣ���ۙ������Ҫ����Hough �ÿ������V������׃��ȡĿ��(bi��o)���|���ą���(sh��)��ۙ����(sh��)������ʹ�Å���(sh��)��ȡ����Hough ����(j��)�ռ����ļt��ҕ�l���l(f��)�F(xi��n)�ռ�����ҕ�l�D���еĽ��|�W(w��ng)��(d��o)�����F(xi��n)�ڈDƬ�У�ͨ����2~4 ��ˣ���Ҫ����(j��)ֱ����(sh��)���c(di��n)�M(j��n)��ӑՓ��Ȼ���Д����ȡ���|�W(w��ng)Ŀ��(bi��o)��ֱ������(sh��)��ͨ�^�������V�����A(y��)�y(c��)�t��D���н��|���ą���(sh��)��ۙ���֣��ٴΫ@ȡ��(sh��)�H���|���Ĝy(c��)������(sh��)����������(sh��)�c���|����һƥ�䣬��K��(sh��)�F(xi��n)�t��ҕ�l�н��|���ęz�y(c��)��ۙ�����|�W(w��ng)Ŀ��(bi��o)�z�y(c��)��ۙ�㷨���̡�
2 ���|���z�y(c��)
2.1 �D���A(y��)̎��
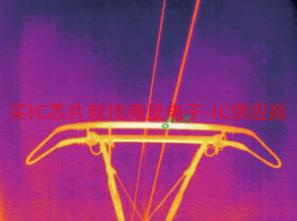
���ȣ��t��D��(Ҋ�D2a���D(zhu��n)�Q��ҶȈD��(Ҋ�D2)b������������߈D���е�������Ϣ����߈D��̎���Ĺ���Ч�ʣ�Ҳ�����M(j��n)һ��̎��D����D�������D��ָ�ȣ�����Σ� ���ô�����m��(y��ng)�D���ֵ���ָ��@�ö�ֵ�D��(Ҋ�D2c��������LjD��ָ����ֵ�x�������㷨[7]��������(ji��n)�Σ����܈D�����Ⱥ͌�(du��)�ȶȵ�Ӱ푣��V����(y��ng)���ڔ�(sh��)�ֈD��̎��������˫@ȡ�D���߅����Ϣ�� ����prewitt߅���z�y(c��)�㷨[8]��ȡ���|�W(w��ng)��߅��������Ϣ���@ȡ��ֵ��߅���D��(Ҋ�D2dNordic��������Prewitt ߅���z�y(c��)���ӌ�(du��)����һ����������������(du��)���Ҷȝu׃�ĈD��̎�����^�õ�߅��Ч�����������OTSU ���m��(y��ng)�ֵ�ָ��Prewitt �c���y(t��ng)��߅���z�y(c��)�㷨��ȣ����Ӿ���߅����(x��)��(ji��)����������������С�ă�(y��u)�c(di��n)�����Ը�����������(zh��n)�_����ȡ߅����Ϣ��
���O(sh��)�t��ҕ�l�е�Ŀ��(bi��o)���|��s ����ʹ��һ��(g��)��������(sh��)Peak(s,:) ����rho_max �O����(bi��o)ϵ�°돽���ֵ��ʾ����|������(sh��)��theta_max �O����(bi��o)ϵ�½Ƕ����ֵ��ʾ����|������(sh��)��

ʽ�У�x1(s,:) ���ڵ�s �����|������(sh��)���A(y��)�y(c��)��ꇣ�A ��ʾ��s-1 ���(y��u)��Ӌ(j��)x(s-1) �Ɯy(c��)����s �����|��܉�E����(sh��)�^�y(c��)��ꇣ�w �A(y��)�y(c��)ģ�͵��^������B ���ƾ�ꇱ�ʾ������w ��������ڮ�(d��ng)ǰ��B(t��i)�������nj�(du��)�t��ҕ�l��Ŀ��(bi��o)���|������(sh��)���A(y��)�y(c��)���@���ƽ��ֵ��0 ��˹��ģ�M�A(y��)�y(c��)�Юa(ch��n)�����`�ҕ�l��ÿ���IJ��_���Զ���ͨ�^��B(t��i)���f(xi��)�����ꇁ���ʾ�ģ��A(y��)�y(c��)����(sh��)��횲���(zh��n)�_������ͨ�^��B(t��i)���f(xi��)������Q ��ʾ�A(y��)�y(c��)�^���е��`�����һЩ���_�����أ��A(y��)�y(c��)�`��f(xi��)��������

ʽ�У�p1(s,:) �f(xi��)����������һ�����|��λ�Å���(sh��)���A(y��)�y(c��)�`�p(s-1,:) �^�y(c��)�`��f(xi��)��������ǰһ��λ�Å���(sh��)����ѹ�Ӌ(j��)��A �A(y��)�y(c��)��һ������ѹ�Ӌ(j��)s �����|��܉�E�ą���(sh��)�D(zhu��n)�ƾ�ꇵ��D(zhu��n)�ƾ�ꇡ��ڼt��ҕ�l�У����|���ڌ�(sh��)�H�z�y(c��)�ПoՓ��ζ��o�������`��Hough ��(y��n)����f��׃�Q�z�y(c��)�Ľ��|��ֻ�nj�(du��)���|������(sh��)���A(y��)�y(c��)��Ӌ(j��)��Kalman ���A(y��)�y(c��)�^�̺͜y(c��)�������ɲ��ֽM�ɣ������A(y��)�y(c��)���|����(d��ng)ǰλ�Å���(sh��)���A(y��)�y(c��)�`��f(xi��)����V����У��������Ҫ�Ǹ����A(y��)�y(c��)��B(t��i)������Kalman ���V�����棬���ÞV������K(s) ����λ�Å���(sh��)ֵ�ͅf(xi��)���
������������_(d��)ʽ��

ʽ�У�k(s) ���s �������V������(sh��)����R �Dž���(sh��)�^�y(c��)���f(xi��)�����ꇣ�������(sh��)�Ĝy(c��)���`�H ���A(y��)�y(c��)����(sh��)���A(y��)�y(c��)����(sh��)�ą���(sh��)�D(zhu��n)�ƾ�ꇡ�
��(sh��)�W(xu��)���_(d��)ʽ�Ɯy(c��)�˽��|����һ��λ�Å���(sh��)����ѹ�Ӌ(j��)ֵ

ʽ�У�x1(s,:) �ǵ�s �����|����(sh��)�H܉�E�ą���(sh��)�Ɯy(c��)ֵ��y(s,:) �ǵ�s �����|������(sh��)�Č�(sh��)�H�y(c��)��ֵ�Dž���(sh��)�^�y(c��)ֵ��
����¼t��ҕ�l�D���н��|����(sh��)�Hλ�Å���(sh��)�c�z�y(c��)λ�Å���(sh��)֮�g���`��f(xi��)�����ꇣ��������A(y��)�y(c��)�`��f(xi��)������

�����Ϸ������Կ������������V����ʹ�õ���Ϣ���Ǖr(sh��)���(n��i)������ ��ˣ��������V�������ڕr(sh��)���(n��i)�O(sh��)Ӌ(j��)�ģ� �m���ڶ�S��r���������ÿ������V�����A(y��)�y(c��)��(d��ng)ǰҕ�l�����|���ą���(sh��)����Ӌ(j��)���|����܉�Eλ�á�����ڼt��ҕ�l��ijһ���Л]�Йz�y(c��)�����|���ą���(sh��)��Ҳ�]���A(y��)�y(c��)�����|���ą���(sh��)���t�ŗ�ӛ�ҕ�l�����|����܉�Eλ�á�
4 ��(sh��)�(y��n)�Y(ji��)��
���ñ��Č�(sh��)�(y��n)MATLAB R2018a �����h(hu��n)���飺CPU��Intel Core i5-8250U@ 1.6 GHz 1.8 GHz����(n��i)�棺8G��Windows10 ����ϵ�y(t��ng)��ʹ��MATLAB ���挍(sh��)�F(xi��n)MP4 �Ľ��|�W(w��ng)�j(lu��)ҕ�l�ļ������Ў����D(zhu��n)�Q���Դ����ЈD��������(du��)���|���ĸ�ۙ�ɹ���(sh��)�F(xi��n)����(sh��)�(y��n)�Y(ji��)��������ԓ�㷨�������õĜ�(zh��n)�_�Ժ��@���ĸ�ۙЧ������늚⻯�F·�Ŀ��ٰl(f��)չ�����|���z�y(c��)��ۙ�о��о������õđ�(y��ng)�Ãr(ji��)ֵ��
5 �Y(ji��)�Z
���ڙC(j��)܇������^������Ҫ�l�����Q��·���Դ_���C(j��)܇�ĸ��ٰ�ȫ�\(y��n)�У���������˸����F·���|���ęz�y(c��)��ۙ�������Խ�Q�{��^���й��W(w��ng)���x����İ�ȫ�¹ʣ��˷����S����Ƶ��\(y��n)��(d��ng)Ŀ��(bi��o)�͏�(f��)�s���\(y��n)��(d��ng)���}�����˜�(zh��n)�_��ۙ�t��ҕ�l�еĽ��|����ʹ����Hough ֱ������(sh��)�Ϳ������V����ۙ����(sh��)���D(zhu��n)�Q��ȡ���������M(j��n)�����m��(y��ng)�z�y(c��)��Hough ׃�Q�z�y(c��)�ٶ������������g�����⣬�ڽ��|���\(y��n)��(d��ng)����׃���������r�£��������V������ۙ����(sh��)��ۙ����(du��)��(w��n)��������Ŀ��(bi��o)λ�Ç�(y��n)�����εȏ�(f��)�s�����£���ۙЧ���^���Ҫ�ں��m(x��)�������M(j��n)һ���о���
�����īI(xi��n)��
[1] SINHA A,KIRUBARAJAN T,BAR-SHALOM Y.Application of the Kalman-levy Filter for Tracking Maneuvering Targets[J].IEEE Trans. on Aerospace and Electronic Systems,2007,43(3):1099-1107.
[2] ��½�.�����F·���|�W(w��ng)�z�y(c��)���g(sh��)�о�[J].2020(02)���ļ��b�:253-254.
[3] ꐸ��A���|�L(f��ng)�����a��.����Hough׃�Qֱ���z�y(c��)�еķ�ֵ��ȡ[J].2006(04)̫ԭ�Ƽ���W(xu��)�W(xu��)��(b��o)256-258.
[4] �����ѣ��̺겨.�о������F·�������ϵ�y(t��ng)�Ľ������������A(y��)��ϵ�y(t��ng)[J].2012��36��(10)늾W(w��ng)���g(sh��).
[5] ����ᡢ����܊�����ĺ���.���ڱ���ضȷ��Ľ��|��ĥ�p�t���\��[J].2011��28(12)�C(j��)늹���1426-1429.
[6] ����.���ڼt�����x���|�W(w��ng)�d���ضȱO(ji��n)�y(c��)����ϵ�y(t��ng)���_�l(f��)[D].����:2017������������W(xu��).
[7] CAO J,CHEN L,WANG M,et al.Implementing a Parallel Image Edge Detection Algorithm Based on the Otsu-Canny Operator on the Hadoop Platform[J].Computational Intelligence �� Neuroscience,2018(3):1-12.
[8] ����������¡��O�pƽ.����Prewitt���M(j��n)�㷨[J].2018��38��(05)������ӿƼ���W(xu��)�W(xu��)��(b��o)(��Ȼ�ƌW(xu��)��) 39.
[9] ���J���S���A���ƽ�����.�ı��D���ֵ���������ڻҶ�ֱ���D���V���[J].����c��Ϣ�W(xu��)��(b��o).2009,31(10):2460-2464.
[10] SATZODA R K,SATHYANARAYANA S,SRIKANTHAN T,et al.Hierarchical additive hough transform for lane detection[J].IEEE Embedded Systems Letters,2010,2(2):23-26.
[11] �����������B��.Hough��׃߅������(sh��)��ȡ�㷨[J].1996(04)ͬ��(j��)��W(xu��)�W(xu��)��(b��o)(��Ȼ�ƌW(xu��)��).
[12] �����w.����Houghֱ����ȡ��ƥ��׃�Q[D].����:�|�����̼��g(sh��)��W(xu��)��2009.
[13] �S��.�����O(sh��)��S�o(h��)���ԵĽ��|�W(w��ng)������Ϣϵ�y(t��ng)���о�[D].�ɶ�:2013�����Ͻ�ͨ��W(xu��).
[14] �����������B��.Hough��׃߅������(sh��)��ȡ�㷨[J].1996(04)ͬ��(j��)��W(xu��)�W(xu��)��(b��o)(��Ȼ�ƌW(xu��)��).
[15] ���������t.��ۙ�͜y(c��)�����ڿ������V�����Ą�(d��ng)�B(t��i)Ŀ��(bi��o)�\(y��n)��(d��ng)����(sh��)[J].2012��31(08)�Ԅ�(d��ng)�����g(sh��)�c��(y��ng)��:20-23.
(���ā�Դ��IC2021��1�£������s־








- COMPUTEX 2022��(sh��)�wչ Ԫ�����cESG���}������
- 50 �Ѽ�������I(y��)�C(j��)��(g��u) SOAFEE ��ͬ�ڙ�(qu��n)ܛ�����x��܇��δ���l(f��)չ
- Ӣ�ؠ��ڵ�Ͷ�Y170�|�WԪ���쳬��(j��)оƬ������
- �ǿƼ�COMPUTEX 2022Ӌ(j��)��C(j��)չ�ھ��Lj�(ch��ng)
- ���a(ch��n)оƬӭ�����ش�ͻ�ƣ����¿Ƽ��l(f��)����(chu��ng)����ȫ��Ӌ(j��)������ӛ�GPUоƬ
- ���_˹����������2024�꣬���_˹�ڌ�(sh��)�w�I(l��ng)����˹����ܽ�Q������(sh��)��������
- e̩����һ��2ϵ�л����̖(h��o)ʾ����
- �ⷨ�댧(d��o)�w܇Ҏ(gu��)�ŘO�(q��)��(d��ng)�����늙C(j��)���Ƶ��`����
- ���ȿ���CITE2022�ڿƼ��a(ch��n)Ʒ��P�c(di��n)
- BOE���F(xi��n)��2022���Dz���(hu��)�� ����Ļ��(li��n)�x���ǻ�����
- �댧(d��o)�wһ��Ҫ3.7-3.11
- ���_��Ӟ�ȫ��T���Ƴ������_�պ�������۽�
